Quadrupede
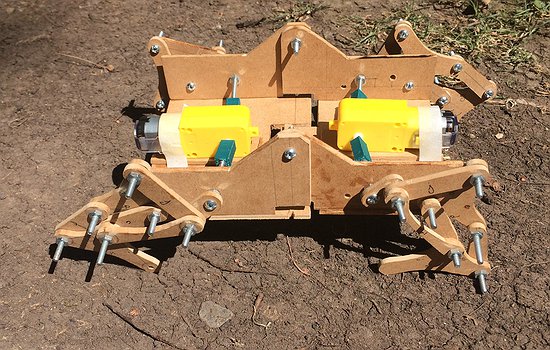
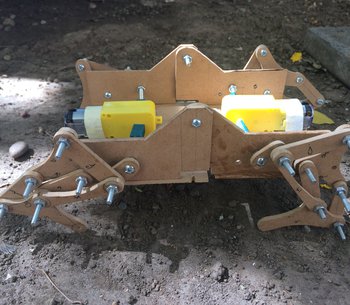
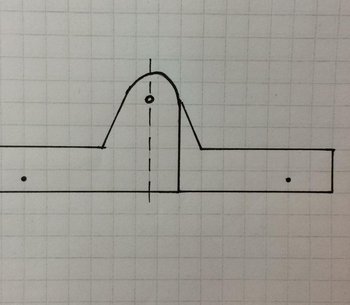
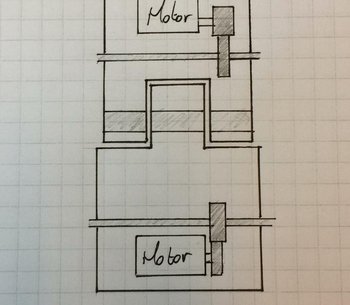
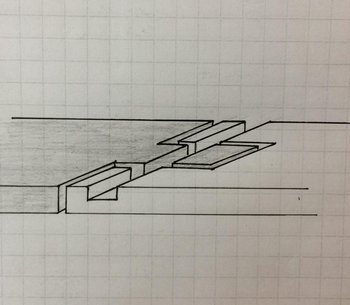
El proyecto toma inspiración en la capacidad de los cuadrúpedos de adaptar su movimiento al terreno, debido a su columna flexible. Para esto se diseño un sistema movilizado por caminadores de Theo Jansen, pero en lugar de de asociar tanto las patas delanteras como traseras a un mismo eje, se implementó un motor independiente en ambos ejes. A partir de esto fue posible reslizar un columna flexible mediante un eje y una unión elástica, la cual le permite al caminador adaptarse mejor al terreno que los diseños clasicos (planos).
This proyect takes inspiration in the capability of 4-legged animals to adapt their movement according to the terrain due to the flexibility of the spine. For this porpose, a moving sistem was designed using Theo Jansen linkage, but instead of associating front and back legs in a single motion, 2 independent motors gave movement to both shafts. This made possible the building of a flexible spine by a system of a shaft and an elastic joint, which allows the walker to adapt better to terrains than the typical flat models.