Mini-Dirigible
Los drones como objeto tecnológico han revolucionado la última década debido a la posibilidad de poder navegar el espacio aéreo, abriendo nuevas posibilidades en diferentes áreas de la robótica. Pero, ¿es un dron la única solución al problema de la navegación en el espacio aéreo? En este proyecto nos involucramos y testeamos otra posibilidad análoga a la solución del dron: El dirigible! O más comúnmente llamado zeppelin, sustentado por helio y en este caso y realizado con un gran reducción de masa para poder utilizar un globo comercial.
Descripción del proyecto
En el pasado ciclo, un medio de transporte aéreo era el otorgado por los grandes “zeppelin” o en español, Dirigible. Todo esto cambió debido a que los aviones comenzaron a superar las prestaciones de los zeppelin, además de los accidentes ocurridos siendo el más recordado el de Hindeburg en 1937.
El objetivo de este proyecto es lograr poner en vuelo un dirigible a escala, pudiendo mantenerse al menos un minuto en el aire, con una autonomía de 5 minutos y una velocidad media de 0.1m/s.
En el siguiente link se puede ver una demostración del dirigible funcionando:
https://youtu.be/z-6ujW_qkbk
Proceso
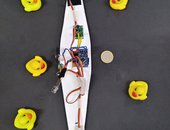
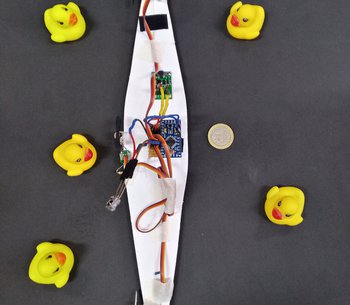
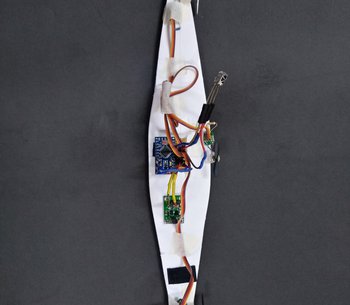
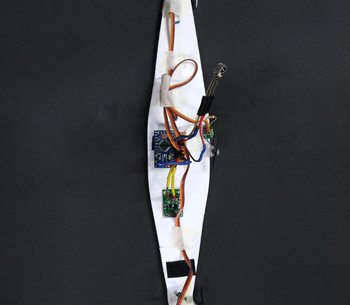
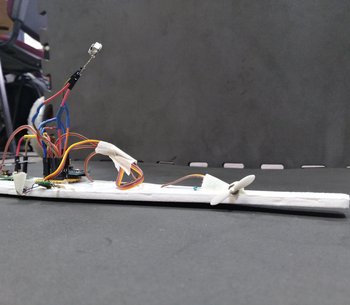
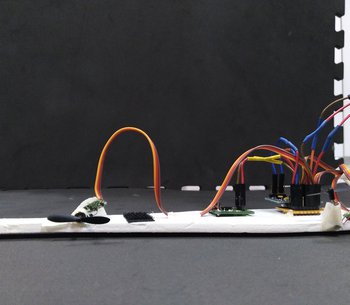
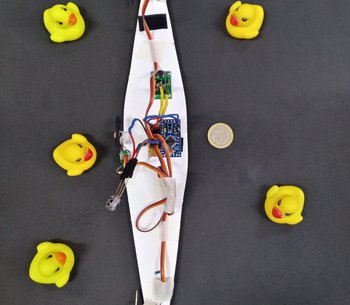
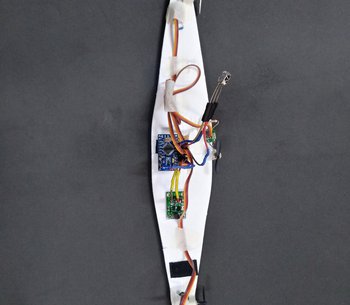
Lo más importante para que el dirigible funcione es que el peso total del sistema sea mayor a la fuerza de empuje del globo por solo 1 gramo. Nuestro sistema tiene un peso total de 36 gramos y un empuje de 38 gramos. Todo el diseño y elección de componentes se hace en función de cumplir las restricciones de peso.
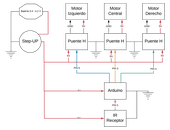
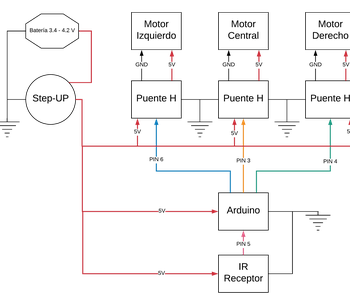
Existen 3 motores con hélices que controlan la traslación y orientación del dirigible. Es posible controlar la velocidad de cada motor por separado. Dependiendo de la combinación de velocidades de los 3 motores se puede controlar la orientación y traslación.
Para comandar los motores se utiliza un control remoto infrarrojo que envía señales al Arduino que tiene conectado un receptor IR (infrarrojo).
La fuente de energía corresponde a una batería LiPo de una celda. Esta elección es debido a que la LiPo es muy liviana y puede entregar corrientes de 2 [A] fácilmente. Sin embargo, el voltaje de la LiPo depende de la carga de esta. Para regularizar el voltaje a 5 [V] , que corresponde a lo necesario para alimentar el Arduino y motores, se utiliza una fuente Step-Up.
Materiales
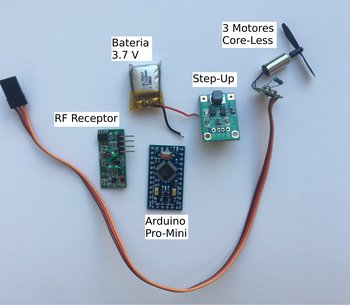
Para poder realizar el proyecto se ocuparon los siguientes componentes:
- Cartón Pluma
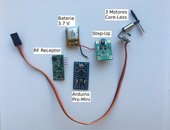
- Arduino Pro Mini 5V 16MHz http://knightrobotics.cl/categoria/tarjeta-de-desarrollo/producto/arduino-pro-mini-compatible
- Batería 3.7 [V] LiPo 100mAh https://www.mirax.cl/detalles.php?codigo=193991
- 3 Motores de alta velocidad.
- 2 CW (clock-wise) https://www.mirax.cl/detalles.php?codigo=193988
- 1 CCW (counter-.clock-wise) https://www.mirax.cl/detalles.php?codigo=193989
- 3 Hélices. 2 CW (clock-wise) y 1 CCW (counter-.clock-wise) https://www.mirax.cl/detalles.php?codigo=193993
- Fuente Step-Up DC-DC 1.5-5v a 5v http://knightrobotics.cl/categoria/fuentes-de-poder/producto/Fuente-Step-Up-DC-DC-1.5-5V-a-5V
- Receptor IR http://www.victronics.cl/index.php?page=shop.product_details&flypage=flypage.tpl&product_id=14963&category_id=2620&keyword=infrarrojo&option=com_virtuemart&Itemid=1
- Globo Metálico “TE AMO” de 26’’
- Helio
- Masking Tape
- Velcro
- Control Remoto IR (infrarrojo) genérico. Sirve el de la televisión o cualquiera.
- 2 resistencias de 5k y 2 resistencias de 2.5k para hackear controladores de servo. Estas son para reemplazar el potenciómetro que utiliza el servomotor. (ref: https://www.instructables.com/id/How-to-Make-a-TowerPro-Micro-Servo-Spin-360/)
Software
A la placa Arduino se le carga el código que establece la lectura del sensor IR y el control de los 3 motores. Para la lectura del sensor IR se utiliza la librería IRremote. Para el control de motores se utiliza la librería Servo. Sin embargo, es posible enviar una señal PWM a cada puente H sin utilizar la librería Servo.
IMPORTANTE: La librería IRremote utiliza determinados "timers" de la placa Arduino que pueden causar conflicto con la generación de señales PWM en ciertos pines. Es necesario verificar que el "timer" utilizado por la librería IRremote no sea perteneciente a un pin conectado a un motor.