Robot Omnidireccional
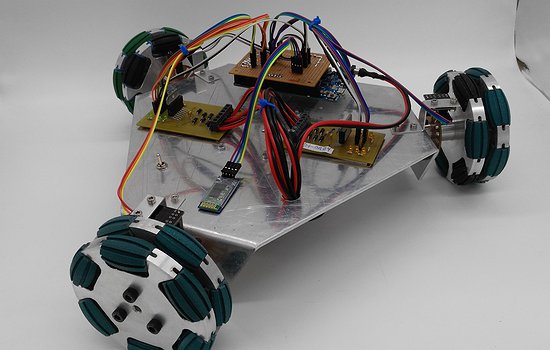
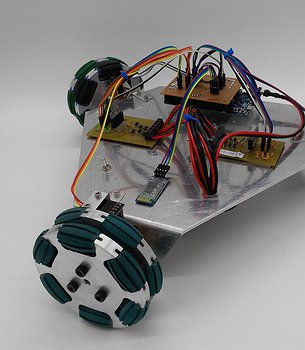
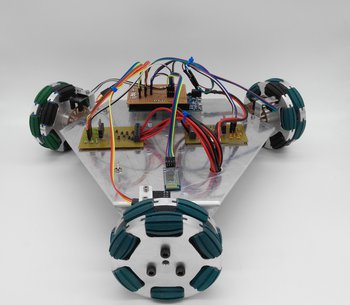
El proyecto consiste en un robot omnidireccional de tres ruedas controlado remotamente con una aplicación de Android.
El robot es capaz de movese con tres grados de libertad independientes, uno corresponde al movimiento adelante-atrás, otro al movimiento izquierda-derecha y otro correspondiente a las rotaciones. El control de motores se hace utilizando una placa Arduino que recibe instrucciones remotas de la aplicación desarrollada para Android.
El proyecto fue desarrollado para el Taller de Proyecto de Robótica y Mecatrónica.