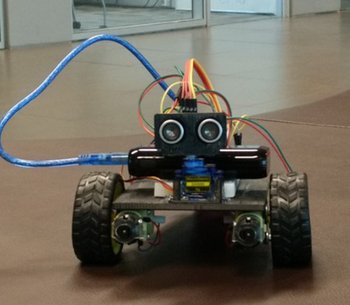
Smart Car
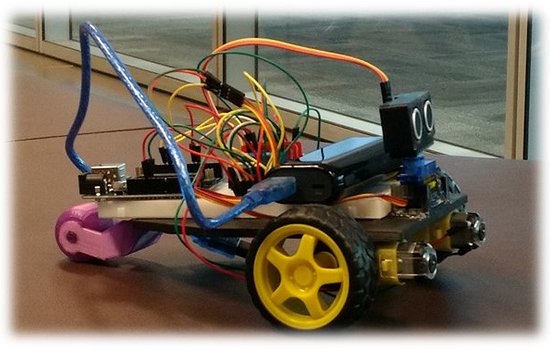
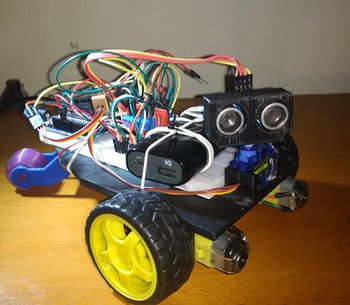
Vehículo de 3 ruedas autocontrolado que busca avanzar en una dirección esquivando los obstáculos en su camino, para esto utiliza un sensor de ultrasonido rotatorio que mide distancias a objetos cercanos y lejanos en un rango de 135 grados. De esta manera al robot puede identificar su entorno y tomar decisiones de dirección utilizando un sólo sensor.
Debido a problemas de amperaje, el robot utiliza una bateria externa para alimentar al arduino con 5 volt, mientras que se utiliza una bateria externa de 9 volt para alimentar los motores que le proporcionan su movimiento.
Para imprimir el cuerpo de este robot se usó la impresora Maker del FabLab. Para asegurar la conexion de algunos cables fue necesario el uso de una soldadora con cautín. Para otras sujeciones en el robot se utilizó pegamento de silicona y elásticos.
Objetivo General:
- Crear un robot capaz de realizar una ruta esquivando obstáculos
Objetivos específicos:
- Decidir el tipo de piezas que deberán ser impresas.
- Realizar un montaje adecuado de las piezas y componentes.
- Programar un código que funcione en teoría.
- Re-programar un código que funcione en práctica.
Componentes del robot:
- Arduino UNO
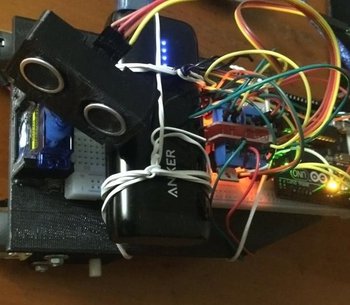
- 1 Sensor ultrasónico
- 2 Motores reductores
- 1 Servo motor
- 2 Modulos IRF 520
- Protoboard grande
- Cables tipo jumper macho y hembra
- Batería 9 volt