CUCHO
CUCHO es un robot dedicado a seguir a su usuario, el cual puede ser utilizado para varias funciones cotidianas. La principal función que se le puede dar al robot es de transportar cargas para el usuario, sin necesidad de que este realice trabajo.
Este robot utilzaría la intesidad de señal detectada por 2 módulos bluetooth montados en el carro para obtener la distancia y dirección a la que se encuentra respecto de su dueño, siendo capaz de ponerse en movimiento y llegar a las cercanias de este sin mayor dificultad. Su velocidad y dirección es proporcionada por 2 motores DC, controlados por un sistema de control PID, el cual permitiría que su desplazamiento sea con velocidad variable en cada rueda.
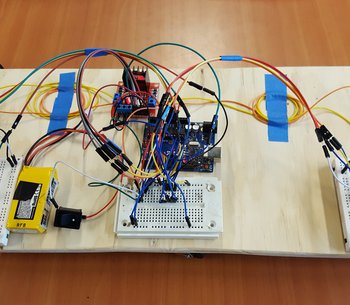
Para esto se desarrolló un prototipo el cual tiene por objetivo probar el concepto de este robot.
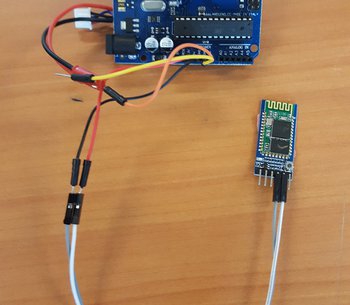
- Primero se desarrolló el código para obtener intensidad de señal a partir de 2 módulos Bluetooth HC-05, trabajando en modo "slave". Esta intensidad de señal es entregada en hexadecimal, por lo que se implementó un transformador hexadecimal a decimal en el mismo programa para obtener intensidad decimal.
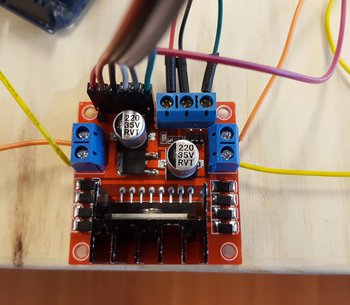
- Una vez obtenidas las intensidades, estas son entregadas a un controlador PID, el cual controla la potencia entregada a los motores (mediante un Puente H). Las variaciones en la intensidad, debido al movimiento del carro, son medidas continuamente, permitiendo al sistema ajustarse a las nuevas condiciones de manera oportuna.
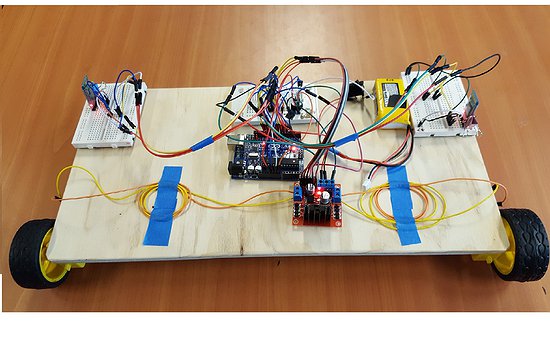
Los materiales utilizados fueron:
- (2) Arduino UNO
- (1) Puente H L298n
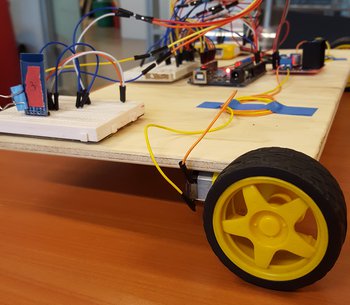
- (2) Motores DC, con caja reductora y ruedas.
- (1) Rueda libre
- (3) Módulos Bluetooth HC-05
- (3) Protoboards
- (2) Baterias Li-Po, 8,4 Volts
- Cables Macho-Macho
- Cables Hembra-Hembra
- (1) Plataforma de madera
Avances
Los principales logros de este primer prototipo fueron la programación del código de medición de intensidad de señal a partir de 3 módulos Bluetooth HC-05 (2 en el carro y 1 utilizado por el usuario), código que hasta ahora no se encontraba disponible en la red. También se logró controlar de cierta manera el avance del prototipo mediante la intensidad de señal y del PID.
Proyección
Se deja planteada la tarea de ajustar el código PID para futuros colaboradores, de manera de controlar de manera efectiva el avance del robot. Para esto dejamos el link del código completo que comanda al robot: https://github.com/almoro189/CUCHO-Code