El escalador del futuro
PROYECTANDO EL CUERPO DEL FUTURO: NUEVAS HERRAMIENTAS, EXPRESIONES Y EXPERIENCIAS
Curso Seminario de Diseño e Innovación Tecnológica (ME-4030, Danisa Peric y Pedro Garretón)
El escalador del futuro
1. Estudio del contexto particular:
El montañismo es una actividad recreativa o deportiva que consiste en el ascenso y descenso de montaña. Dentro de esta existen tres especialidades principales:
- Senderismo: caracterizada por un recorrido a través de una ruta en la montaña.
- Escalada: consistente en el ascenso de paredes de alta pendiente.
- Resistencia: consistente en maratones de montaña.
Trás una revisión preliminar de cada disciplina se decidió investigar la especialidad de escalada. En esta existen dos ramas distintas, la escalada sobre hielo y la escalada en montaña. Ambas poseen condiciones particulares que ameritan un enfoque distinto, por ejemplo la escalada sobre hielo requiere de indumentaria para el frío, botas con soportes enterrables en hielo duro, hacha de hielo, casco, etc.
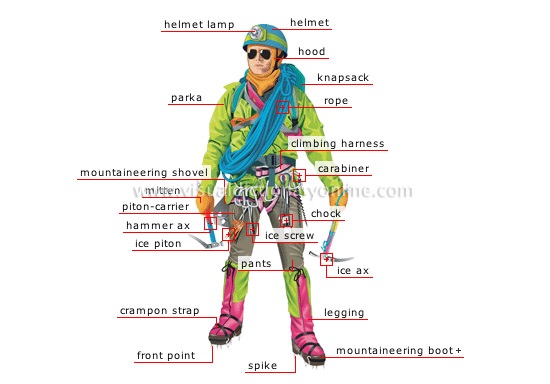
Imagen 1: Indumentaria de escalada sobre hielo
En cambio, la escalada en montaña al realizarse en un clima distinto, requiere del uso de menos aparataje para hacer frente al calor y para entregar mayor movilidad al escalador, el cual suele acompañarse de una cuerda y anclas que clava en la pared para sujetarse y poder ascender, además de protección como casco y zapatillas de escalada. También existen deportistas más extremos que realizan la "escalada libre", la cual es sin indumentaria y su desafío está en el riesgo de no utilizar cuerda.
Imagen 2: Indumentaria de montaña
Dentro de la rama de escalada en montaña existen distintas técnicas y prácticas para realizar una escalada exitosa. El escalador debe procurar contar con 3 puntos de apoyo siempre para evitar perder el equilibrio. Al mismo tiempo es extremadamente importante sincronizar los movimientos de las piernas y las manos, intercalando las extremidades de un lado con el otro para evitar el "efecto puerta", el cual ocurre cuando se tienen dos puntos de apoyo en el mismo lado y es riesgoso para el escalador. Por otra parte, se estudiaron los movimientos que realizan los escaladores a través de videos, imágenes y entrevistas y se determinó que las piernas tienen un uso propulsor y que los escaladores evitan utilizar la fuerza de los brazos para ascender ya que genera mucho desgaste energético. Es por esto que los brazos tienen un uso enfocado a mantener el equilibrio y las manos a aferrarse de protuberancias o hendiduras en la montaña.
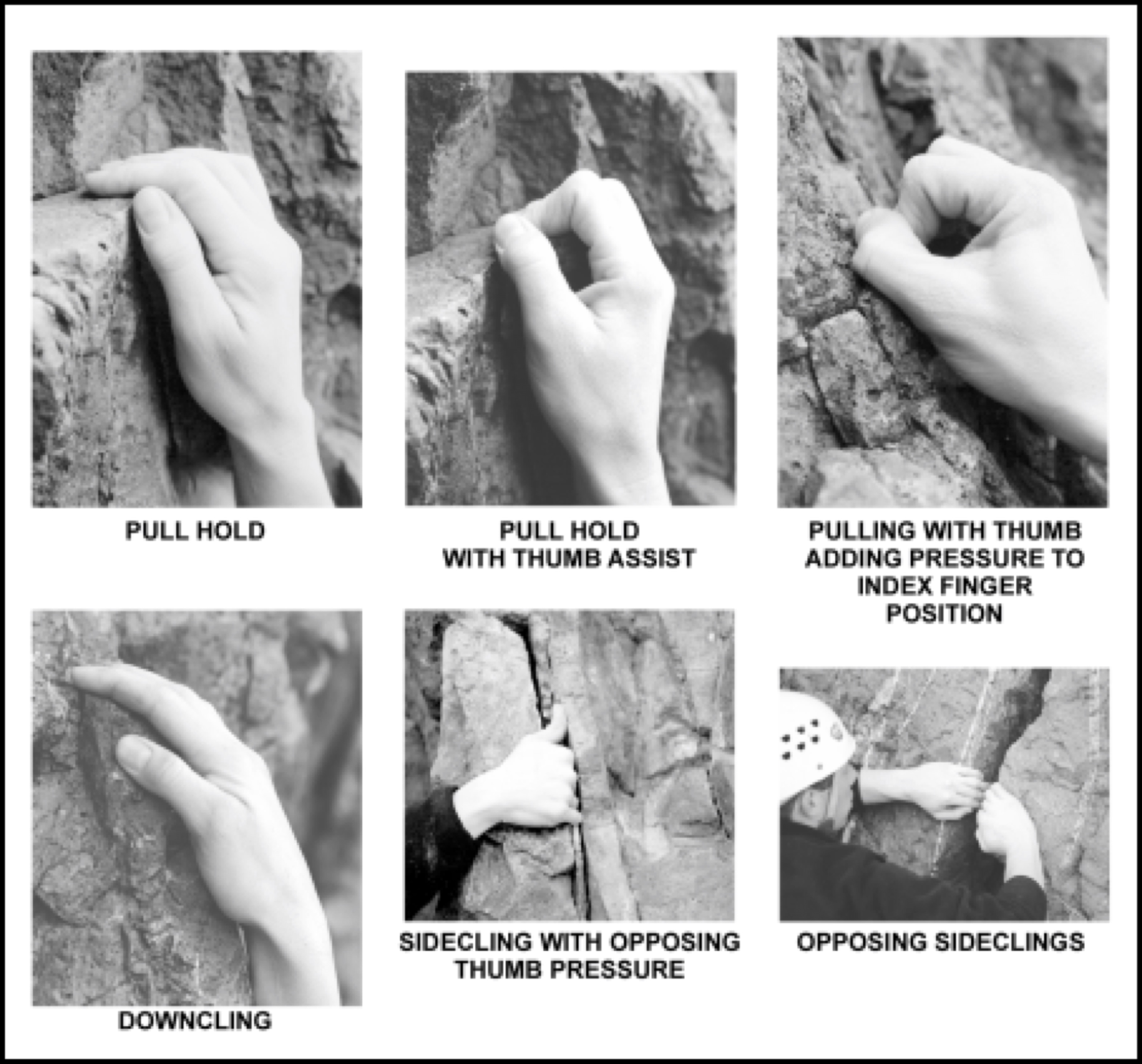
Imagen 3: Tipos de agarre clásicos
2. Problemáticas y oportunidades:
A través de una investigación sobre los problemas existentes al realizar esta actividad, se determinaron los siguientes factores relevantes para la escalada de montaña:
Visibilidad: Al momento de escalar existe dificultad para encontrar zonas de agarre cómodas de manera rápida, generando un desgaste energético en el escalador al demorar más la subida.
Dolores de cuello: Sobretodo al momento de asegurar se genera un esfuerzo enorme en las articulaciones facetarias al necesitar mirar hacia arriba constantemente y evitar soltar la cuerda, lo que genera problemas en el corto y largo plazo sobre el cuello.
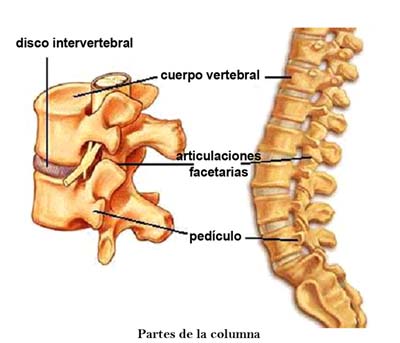

Imagen 4: Esfuerzo de las articulaciones facetarias en la asegurada. [2]
Daño a la visión: Los rayos UV generan daños a la vista y a la piel.
Agarre: Al existir demasiada irregularidad en la ladera existen protuberancias muy escasas y pequeñas en algunas zonas extremas, generando que el escalador se vea impedido de continuar por un sitio o tenga que hacer un esfuerzo enorme en sus dedos y tendones para sostenerse. Por otra parte, existe un daño a la piel al depender del roce que genera esta con la montaña.

Imagen 5: Manos de un escalador tras una actividad. [1]
Problemas de agarre: Debido a la irregularidad de la montaña y a la forma en que se escala, la búsqueda de un punto de apoyo resulta en protuberancias pequeñas que exigen un esfuerzo enorme para la mano del escalador generando problemas en los dedos (principalmente en la técnica Pinch Hold). Una de las mayores limitantes estudiadas a través de material audiovisual fue su capacidad de agarre de puntos de agarre difíciles, lo que no solo genera impedimentos para continuar el ascenso si no problemas de desgaste a nivel físico debido a lo frágil que son las articulaciones de los dedos.
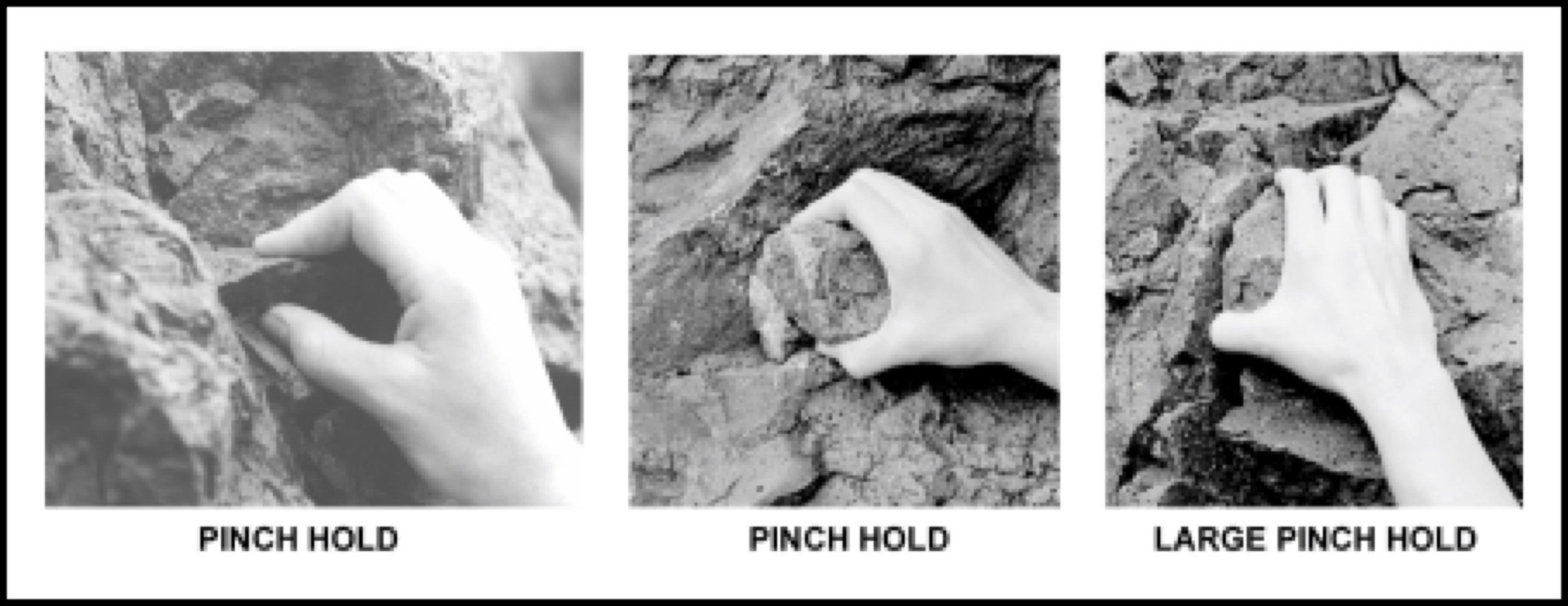
Imagen 6: Agarres en forma de pinza clásicos.
Resistencia: Una limitante para sesiones de subida extensas y de mayor rango de altura es la capacidad del escalador (técnica) para evitar hacerse daños en las manos y generar un desgaste enorme en sus músculos.
3. Atributos de las soluciones estudiadas:
Se definen como objetivos del proyecto:
1) Aumentar agarre
2) Aumentar resistencia
3) Aumentar visibilidad
Esto se aborda de manera integral, ya que si se aumenta la capacidad de agarre de las manos del escalador a través de un incremento de la fuerza en estas extremidades se logrará generar al mismo tiempo una mejor resistencia al requerir menos esfuerzo físico y mental del escalador facilitándole el uso de más tipos de protuberancias. Por otra parte, esta mejora en el agarre le permitirá ascender más por el aumento de la resistencia y de tipos de punto de apoyo. A sí mismo, el aumento de la visibilidad permitirá facilitar el agarre al mejorar la visión sobre potenciales zonas de ancla, lo que a su vez repercute en su capacidad de resistencia al exigir menos esfuerzo mental y físico para la escalada.
4. Rasgos formales y tecnologías de las propuestas:
Para los problemas de visibilidad se plantea que el escalador del futuro tendrá una capacidad aumentada de ver los bordes de las superficies para identificar mejor y más rápido las zonas de mayor potencial de agarre. Para llevar esto a la creación de una tecnología se plantea la fabricación de gafas con realidad aumentada que a través de dos cámaras frontales son capaces de superponer en la imagen los bordes de las superficies para hacer que el usuario tenga una vista con una definición mejorada de estos.

Imagen 7: Boceto de solución planteada para visibilidad.
En un principio se planteó la subida de contraste, pero al generar mayor oscuridad en zonas de baja luz (lo que puede generar una pérdida de información relevante para el escalador), se plantea utilizar un algoritmo que mejore la definición/nitidez de la imagen, los cuales ya existen hoy en programas de procesamiento de imagen como Photoshop, por lo que debe estudiarse su implementación en vivo sin generar latencias.
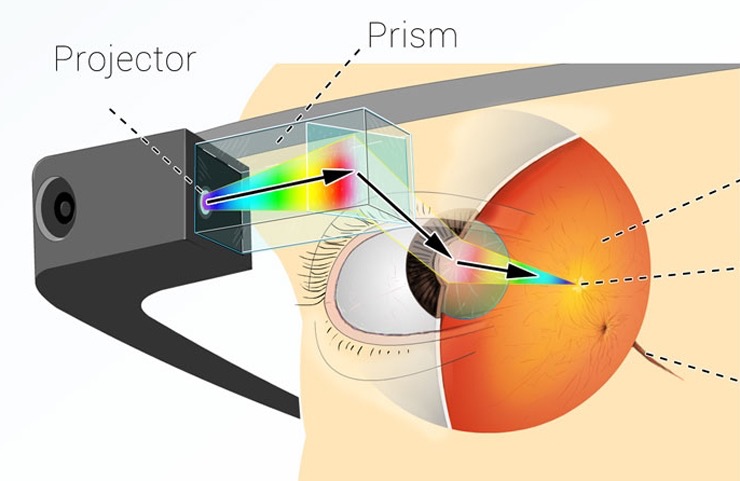
Imagen 8: Realidad aumentada a través de proyeción sobre prisma.
Por otra parte, para la proyección de estos bordes en la imagen que ve el escalador ya existen tecnologías como el Google Glass, la que a través de un prisma y un proyector son capaces de generar una realidad aumentada en la visión del usuario. Aún así debe estudiarse la posibilidad de que esta proyección sea de mucha nitidez para aumentar la capacidad de visión de bordes del escalador de forma eficaz. A sí mismo, un desafío importante para esta tecnología es generar un match entre lo que observa el escalador y lo que el prisma proyecta sobre la imagen, de manera que calcen los bordes proyectados con los que el escalador observa. Para esto se plantea el uso de dos cámaras frontales de alta resolución con lo que se obtiene un campo de visión de la magnitud que tiene el ser humano y debido a que estas gafas pueden fijarse a la cabeza y por tanto al eje en que el campo de visión se mueve el desafío que resta estudiar consiste en hacer un algoritmo que adapte lo que la cámara observa a lo que el usuario observa, esto probablemente requerirá también una calibración del usuario final del producto.
Otros aspectos relevantes de la solución planteada es que los lentes sean polarizados y que los marcos posean bordes cubiertos con tela para evitar la filtración de rayos UV a los ojos.
Finalmente, un escalador debe mirar constantemente hacia arriba tanto para buscar zonas potenciales de agarre como para estar al tanto de sus compañeros de escalada en el caso de asegurar, la cual es una actividad que consiste en velar por el correcto ascenso y descenso de otro escalador, para lo cual es excesivamente relevante que el asegurador no suelte sus manos de la cuerda y observe constantemente hacia arriba, lo que genera dolores de cuello por el excesivo esfuerzo de las articulaciones facetarias [2]. Por esto se plantea agregar lentes de prisma a la solución planteada, los cuales deben estar anclados a las zonas celestes (imagen 5) de manera que a través de un movimiento de rotación estos puedan aparecer o no en la vista del escalador, esta tecnología ya es posible y se ha visto en las gafas de escalador Clip Up [3]. Por lo que resta estudiar la posibilidad de incluir un mecanismo rotor en estas zonas de las gafas para que el escalador no deba usar sus manos para cambiar a vista prisma y así evitar perder control de la cuerda. Este mecanismo rotor podría ser accionado a través de comandos de voz.

Imagen 9: Lentes de prisma para evitar dolores cervicales. [2]
De llevar esta solución a cabo se solucionarían gran parte de los problemas que existen para el escalador de hoy en cuanto a visibilidad y se estaría más cerca de las capacidades que tendrá el escalador del futuro.
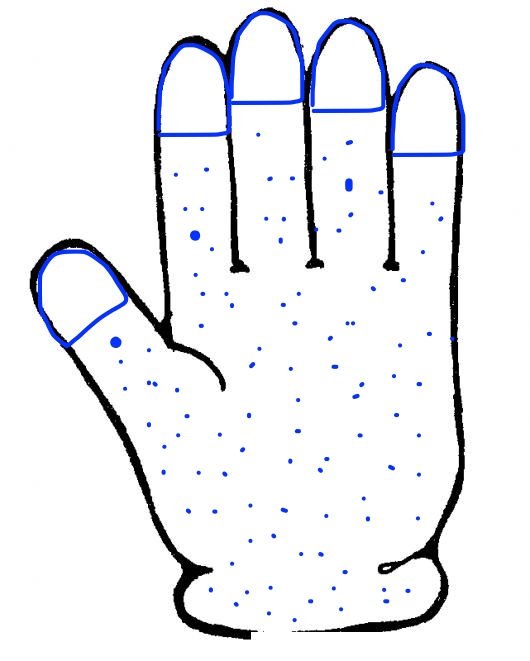
Para los problemas de agarre y resistencia se plantea la fabricación de un guante hecho con un material de malla (con orificios) resistente en yemas y palmas para evitar perder la capacidad total de sensación, lo cual permite comprender la superficie que se está agarrando. Para esto debe estudiarse cuál es el mejor material a utilizar, aunque hoy se conoce el uso de piel de cabra, neopreno y latex para estas zonas de la mano en guantes especializados para escalada [4], los cuales no son ampliamente utilizados por escaladores de roca debido a la pérdida de sensibilidad que generan en los dedos, ante lo cual se plantea que sean mallas en las yemas. Aún así debe estudiarse la capacidad de resistencia de estos materiales al estar en forma de malla o crear patrones de malla que aumenten la resistencia debido a que el fuerte roce que se genera en el material puede afectar drásticamente su durabilidad. Por otra parte, otros materiales posibles para el cuerpo del guante pueden ser nylon transpirable y trozos de material con alto roce estático en las palmas para evitar resbalar. La fabricación de estas cualidades permitirá evitar daños en las manos para los escaladores de montaña y con ello aumentar su resistencia y capacidad de agarre para sesiones extensas de escalada.
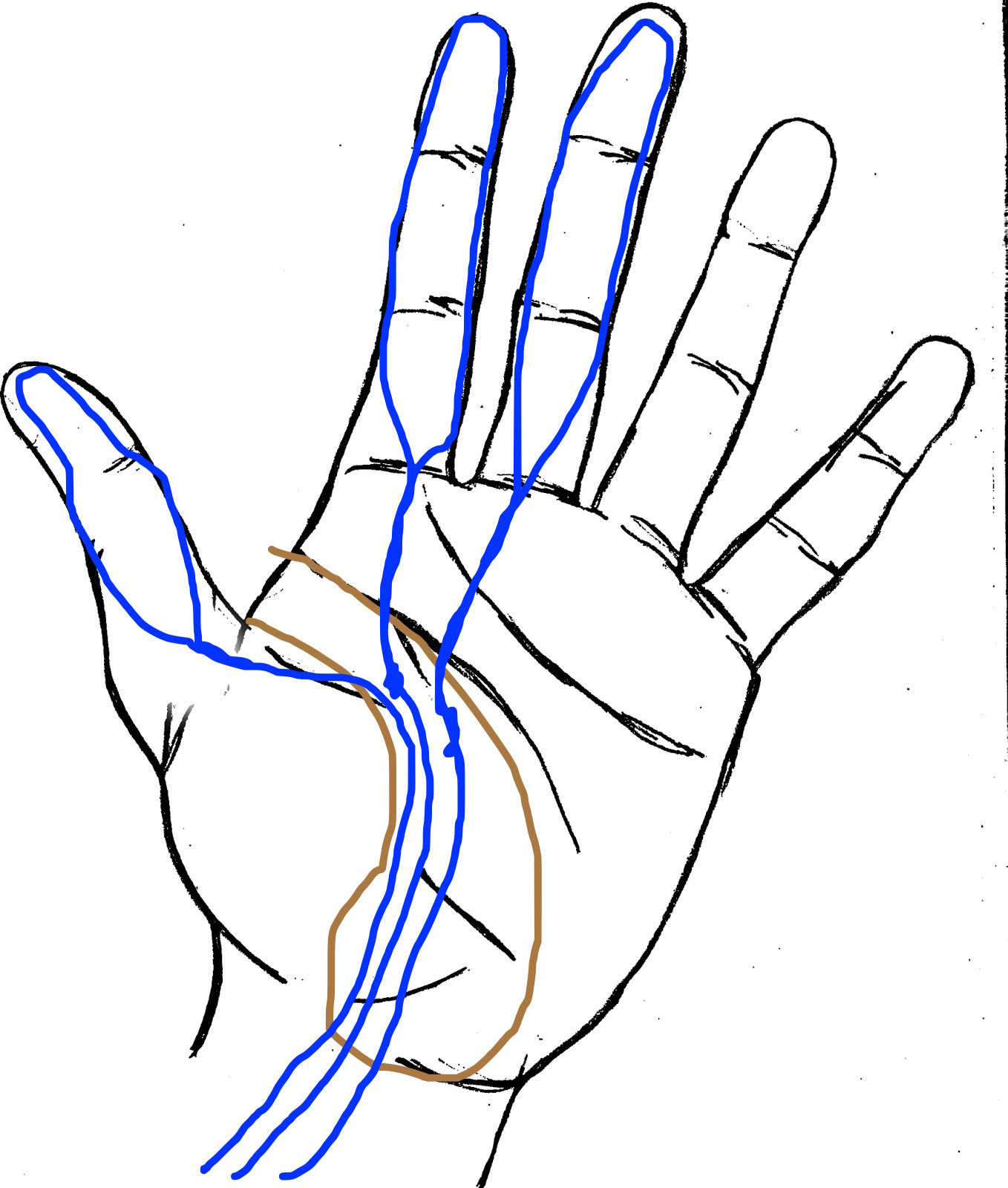
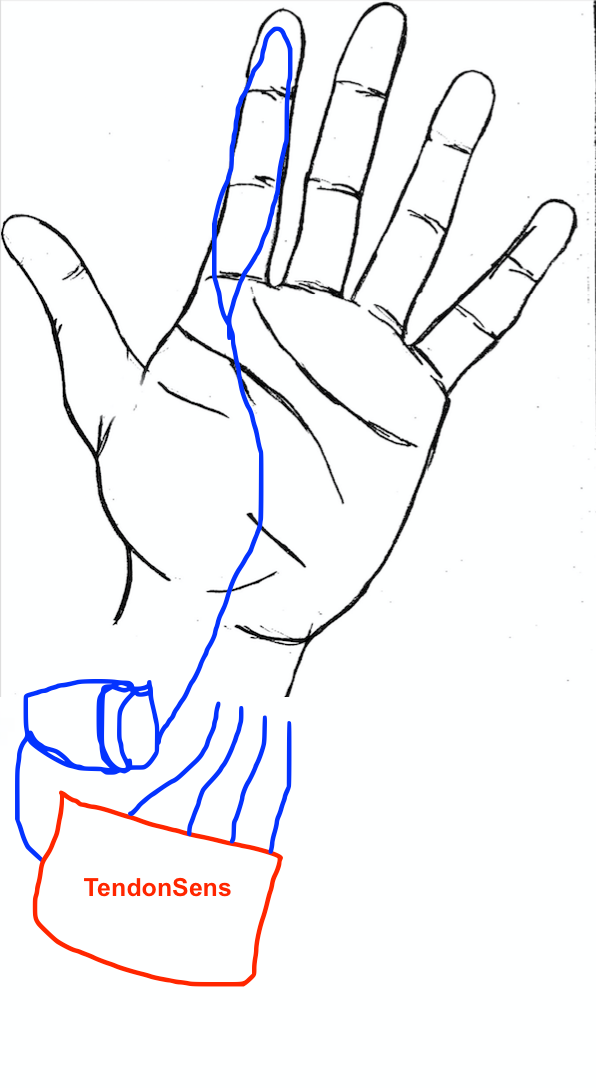
Imagen 10: Boceto de solución planteada para aumentar fuerza de agarre.
Para aumentar la fuerza de agarre en los dedos se plantea la fabricación de una tecnología con tendones artificiales en el guante para jalar de los dedos y hacer que apreten con mayor fuerza. Para esto es posible utilizar hilos de nylon, los cuales poseen gran soporte o eslingas de poliester (que soportan hasta 2500 kilos [5]). Para determinar qué material utilizar deben hacerse pruebas de fuerza y estrés sobre los materiales y al mismo tiempo comprender la fuerza a la que los hilos deben estar sometidos al momento de que un escalador se aferre de una superficie, evitando generar un daño tanto a los materiales como al escalador. Este mecanismo entonces permitiría jalar de los dedos a través de un motor tipo Servo, el cual debe estar sincronizado con el movimiento de las manos para determinar cuánto debe jalar cada dedo. Para esto es necesario contar con una tecnología de sensor para los tendondes de las manos y así determinar qué dedo mueve el escalador y con cuánta fuerza, la cual hoy no existe y debe estudiarse con mayor profundidad.

Imagen 11: Tendones y conexiones con dedos de las manos.
La factibilidad de un mecanismo que jale de los dedos y que esté sincronizado con la fuerza que ejerce el usuario ya está demostrada en tecnologías como el Robo-Glove de la NASA en asosiación con General Motors [6]. La cual usa hilos sobre los bordes de los dedos que jalan de estos con un motor por cada dedo y baterías incluidas.

Imagen 12: El Robo-Glove de NASA y GM [6].
La diferencia con su aplicación en un escalador es que Robo-Glove utiliza sensores en los dedos (en base a presión) para determinar el nivel de cierre de las manos, los cuales no entregan el nivel de precisión y versatilidad de movimientos que requiere un escalador de montaña al verse enfretado a superficies demasiado irregulares, por lo que la tecnología existente está más enfocada en sectores industriales sobre objetos más uniformes, por otra parte la parte externa del guante no entrega las características propias que suman valor a un escalador, como la sensibilidad en los dedos. Es por esto que es necesario un mecanismo preciso de sensores sobre los tendones y así mantener la sensbilidad de las llemas con la tecnologia de malla propuesta. Lo que restaría estudiar para la fabricación de la tecnología es la factibilidad del peso del guante con estos nuevos sensores sobre el escalador y el hecho de que no perjudique su capacidad de resistencia, a sí como la fabricación del mecanismo de sensores y de materiales cómodos para el escalador.
5. Proyecto: El proceso de fabricación del prototipo tuvo como propósito demostrar de una manera simple el concepto y que la fuerza generada por el movimiento de unos motores servo es promisoria de lo que se puede generar con un mecanismo sofisticado basado en un sensor de tendones, los cuales fueron emulados con potenciometros. Para sincronizar el movimiento de los potenciometros con los motores se utilizó un Arduino Uno (código adjunto).
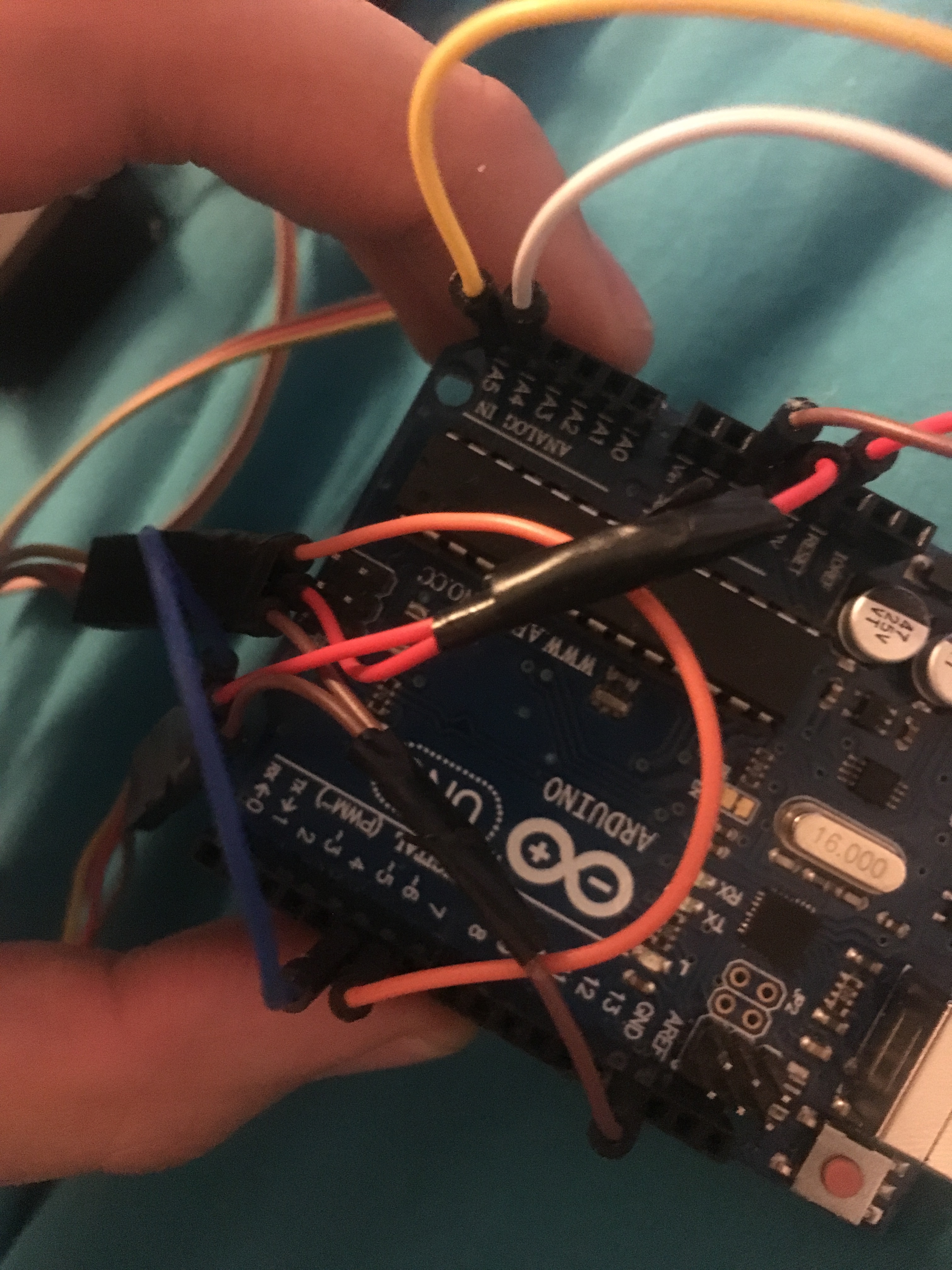
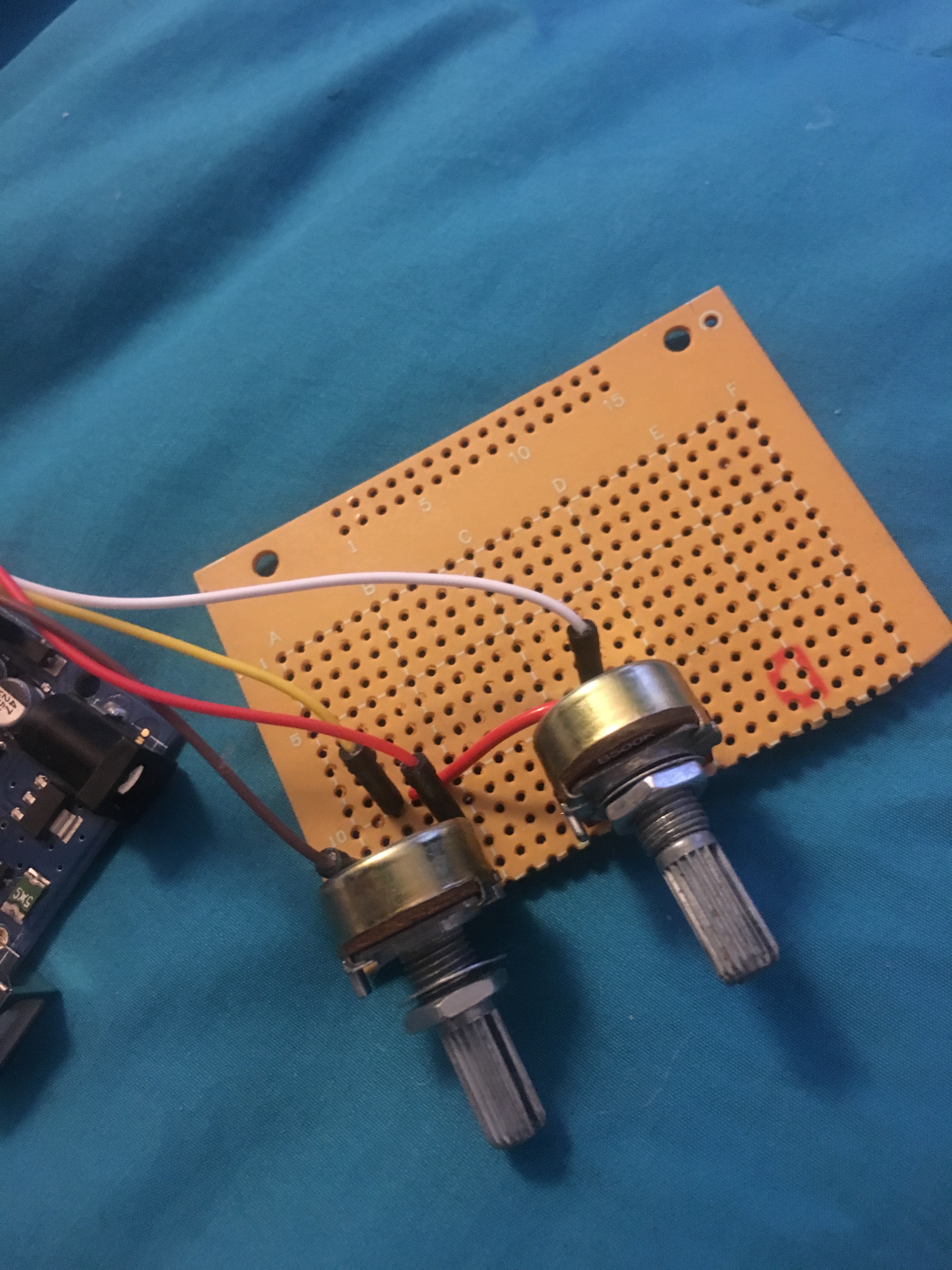
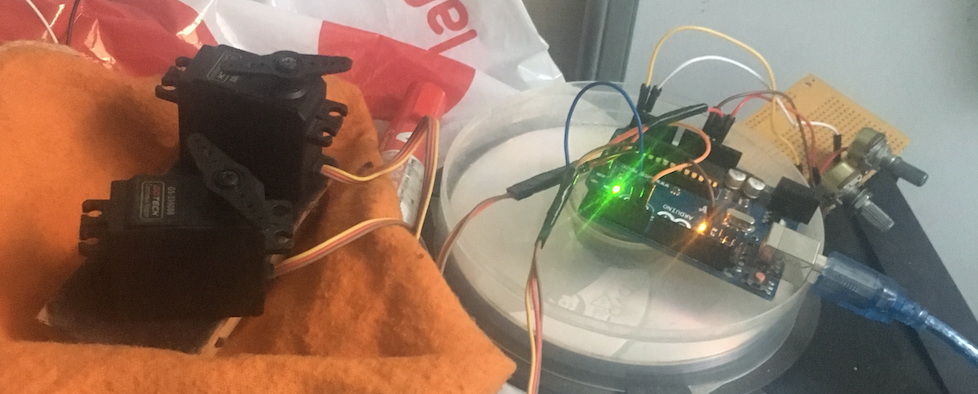
Imagen 13: Prototipo de movimiento realizado.
Restan validar con un prototipo más avanzado que la fuerza aplicada en los dedos sea apropiada y que los materiales resistan el estrés, aunque ya se aprecia en productos como Robo-Glove que esto ha sido validado, por lo que un prototipo enfocado en validar hipótesis debe enfocarse en determinar qué materiales utilizar para la parte externa del guante y que los largos usos de este no generen incomodidad al escalador. Finalmente la tecnología de sensores de tendones requiere de una investigación profunda y experimentación.
6. Proyección: La mayor limitante tecnológica que existe para desarrollar este proyecto hoy es la tecnología para detectar las tensiones de los tendondes en los antebrazos y determinar que dedo es el que la persona está jalando. El resto requiere de un proceso de diseño el cual es realizable con la tecnología existente, aunque para el caso del material en las yemas de los dedos el desarrollo de un nuevo material que permita no perder la sensibilidad y mantener la resistencia del material es crucial para aportar valor a lo que será el escalador del futuro.
7. Referencias:
[1] http://primerpegue.cl/misc/como-siguen-escalando-si-la-piel-de-sus-manos-ya-esta-destruida/
[2] https://www.chileclimbers.cl/2013/01/28/dolor-de-cuello-en-la-escalda-ventajas-y-desventajas-de-los-lentes-para-asegurar/
[3] https://www.gafasdeaseguramiento.com/clip-up
[4] http://deescalada.com/guantes-escalada
[5] http://www.sodimac.cl/sodimac-cl/product/1839446/Eslinga-plana-3000-kgs.-2mts-x-90mm/1839446
[6] https://technology.nasa.gov/patent/MSC-TOPS-37