Optimus Truck
Optimus truck es un proyecto académico del ramo ME-4707, el cual consiste en el diseño y fabricación de un vehículo a partir de módulos de Arduino. El objetivo inicial de este proyecto era que el vehículo se pudiera guiar de forma autónoma a través de una red de caminos que fuera variando en el tiempo, con la condición de hacerlo siempre por el camino más eficiente.
La posición instantánea del vehículo en la red, le sería informada por una serie de cámaras ubicadas por encima de la red de caminos. Estas cámaras, llamadas Optitracks, además, irían actualizando a cada instante la información de los caminos que se irían abriendo y cerrando; de tal forma de mantener siempre actualizada la configuración de la red de caminos.
La motivación detrás de la concepción de este proyecto se encuentra en el ámbito de los yacimientos mineros. En ellos, constantemente se abren y cierran rutas para el paso de las maquinarias, así como también para el paso de los vehículos ligeros. Entonces, cuando los diferentes vehículos que hay en una faena, quieren ir a un punto determinado desde su lugar de partida, se encuentran con la frecuente sorpresa de que la ruta que usaban para llegar al destino, ya se ha clausurado. Entonces, un sistema de navegación general para los vehículos, basado en una actualización en tiempo real de las rutas disponibles, evitaría estos contratiempos; e, incluso, podría ser la puerta para una eventual operación completamente autónoma de los vehículos dentro de una mina.
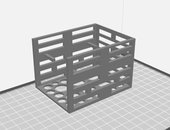
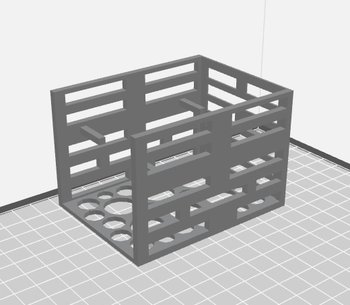
Para el diseño del vehículo se usó el software CAD Solid Edge ST9. Al diseño inicial se le hicieron ajustes, precisamente vaciados, para reducir el tiempo de impresión en las impresoras 3D, además de usar de forma más eficiente el material. El chasis consiste en uno de forma de paralelepípedo, en cuyo interior se alojan la tarjeta de Arduino, controlador de motores Adafruit 2.3, batería de litio y controlador de la batería. A la parte inferior del chasis, se adjuntan los dos motores de corriente continua a cargo de la tracción. Estos motores no se conectan a las ruedas de forma directa, sino a través de una caja reductora de revoluciones.
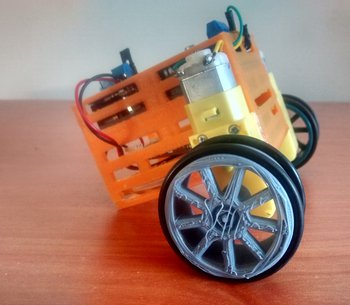
Las ruedas del vehículo se obtuvieron desde una biblioteca libre en internet, se imprimieron en el FabLab, y se les agregaron sendos elásticos para impedir el deslizamiento entre ellas y el piso al momento en que giren para arrancar el prototipo.
Finalmente, por medio de un código de Adafruit para control de velocidad de motores, se logró controlar manualmente el desplazamiento del prototipo en la red de caminos. Simulando un yacimiento minero, presentamos un mapa con estaciones fijas y un origen para el vehículo. Al robot se le asigna una estación a la cual dirigirse y este se desplaza de forma automática hacia la estación para luego volver al origen. Aunque no se logró controlar el camino en particular que el robot toma para ir al destino se cumple el objetivo de desplazarse hacia estaciones.
// ENGLISH
Optimus Truck is a student-developed project, conceived within the course ME4707 Robotics, and consists of the design and construction of a vehicle based on Arduino hardware. The initial objective of this project was this robot to be capable to achieve self-guiding through a time-varying path network, with the additional constraint that it always went by the optimal path to arrive to its destination.
A series of cameras, called Optitracks, and located above the whole network would be used to inform the vehicle its current position. These cameras would also be continually refreshing information about openings and closures of paths; so as to keep updated at any time the network’s configuration.
The motivation behind this project lies on mining operations. In every mining site, paths are continually being open and closed. Besides, in some sites, there are exclusive routes available only to heavy-machinery or to light vehicles. So, when a vehicle is headed to a specific destination, it can be surprised to see that the path it had to take has been closed already. That is why a general, all-time-updated navigation system would help to avoid such setbacks; and might even be the first step to a fully automatized and autonomous operation system for the vehicles on the mining site.
When it came to design the vehicle’s chassis, Solid Edge ST9 CAD software was used. Some adjustments were made to the initial design, with the goals of both achieve a more efficient use of material and reduce the time required by the 3D printer to build the prototype. The chassis has a somewhat squared shape, more like a parallelepiped; and within it the Arduino board, a motor controller Adafruit 2.3, a lithium battery and that battery’s controller are stored. The two DC motors in charge of the traction of the car, are coupled to the chassis on its lower layer. Those motors are not linked to the wheels directly, but through means of gearboxes that reduce the revolutions attained by the motors.
The wheels were acquired in an internet open library of designs. They were printed in the FabLab, and elastic strips were added round them, to prevent them from sliding on the ground when the motors turn on.
Finally, some kind of manual control of the robot’s displacement on the path network was achieved, with the use of an Adafruit motor rpm control code. We simulate a mining site, by introducing a map with fixed stations and an origin point for the vehicle. The robot is ordered to head for a station and it goes automatically to that point, after what it returns to the origin point. Though a total control on the particular path that the vehicle takes to go to its destination was not accomplished, the goal of it heading for diverse stations was fulfilled.